
Hola Hardmaniacos!, en esta ocasión os enseñaré a construir un dron ZMR250 por piezas a un precio reducido, con el que podremos hacer altos vuelos y grabarlo todo con una cámara HD.
Montaje del dron ZMR250
Con unos mínimos conocimientos de electrónica y ganas de hacerlo uno mismo, podremos montar sin problemas este dron ZMR250, teniendo después la satisfacción de haberlo realizado por nosotros mismos, viendo que vuela a la perfección y sin gastarnos mucho dinero en el dron ZMR250.
Para empezar os detallaré las piezas básicas, para construir dron ZMR250
– Frame (soporte para el dron)
– Naze 32 (el que dirige el dron)
– Receptor emisora
– Placa de unión
– Variadores (necesitamos 4)
– Motores (necesitamos 4, 2 de cada sentido de giro)
– Helices (necesitamos 4, 2 de cada sentido de giro) 5030 o 6030
– Emisora (para poder controlarlo)
– Batería 2S o 3S (recomendable 3s)
– Pilas para la emisora
– Cargador baterías Li-Po (recomendable que se balanceado)
Con todas estas piezas conseguiremos, después de realizar el montaje, volar el dron ZMR250.
Variantes
Este dron ZMR250 es susceptible de añadir más componentes según queramos, por ejemplo ir viendo lo que ve el dron, volarlo de noche…, para lo cual le podremos implementar luces, más capacidad de batería, incorporar una cámara como la Gopro o SJ4000, para ver después o en vivo nuestros vuelos, etc
También, si lo queréis ya montado, podréis adquirir un kit con todo lo necesario, en este link, para que solo sea sacarlo de la caja y disfrutar del dron ZMR250.
Listado de piezas
A continuación os dejo las piezas del dron ZMR250.
– Frame
– Naze32
– Emisora RC con receptor incluido
– PDB
– Variadores
– Motores
– Helices 5030 y 6030
– Batería lipo 3s
– Cargador baterías Lipo con balanceo de carga
A continuación comenzamos con el montaje. En las siguientes capturas podéis ver algunas de las principales piezas que necesitamos para construir el dron ZMR250 que yo mismo compré y monté.
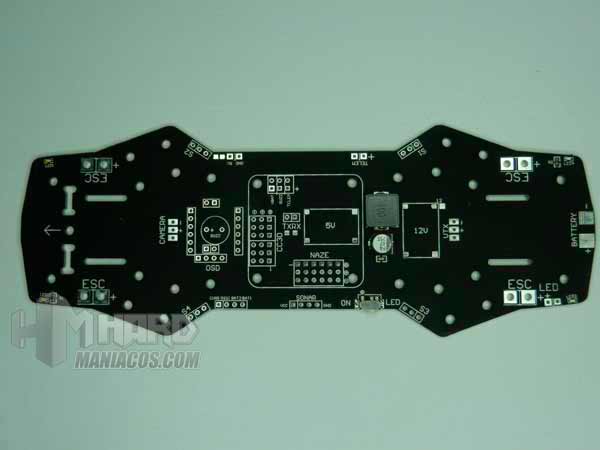
Frame completo con todas las piezas necesarias para montar el armazón del dron ZMR250.

Motor Brushless de 2400KV, necesitaremos 4, dos que giren a derechas y otros dos a izquierdas.

Hélices 5030, pueden ser también 6030. Necesitamos 4, dos que giren a derechas y 2 a izquierdas, recomiendo comprar más, ya que es muy fácil romperlas, sobre todo, mientras no tenemos práctica.

Variador ESC de 12A, lo recomendable es que sean superiores a 10A para que resistan bien el consumo de los motores, necesitamos 4.

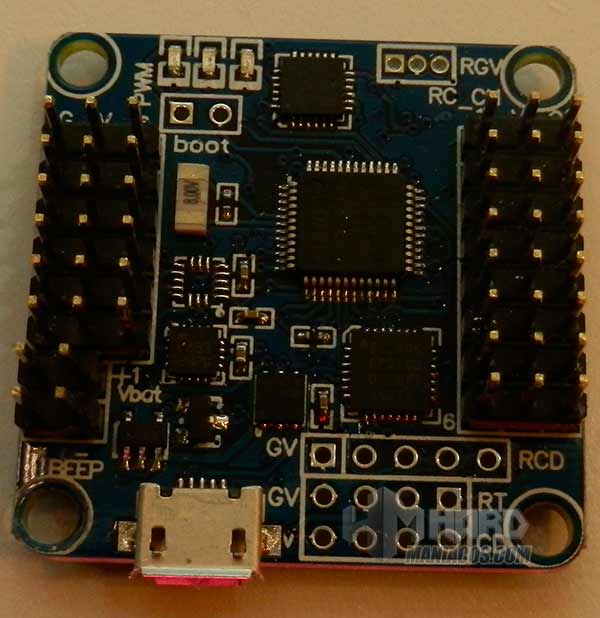
Naze 32, la controladora de vuelo por excelencia, tenemos más modelos y tipos, con diferentes configuraciones y funciones.
Receptor de la emisora, necesitamos uno de por lo menos 4 canales, aunque lo recomendable es de 6, para poder configurar extras.

Batería de 12V, 2200mAh de 20C de descarga, lo recomendable es que sea igual o superior a 20C, así garantizamos una correcta transferencia de la energía a los motores.

A la hora de comenzar con el montaje, tenemos que tener en cuenta los sentidos de giro de los motores, para realizar correctamente las uniones de los cables o soldaduras con los variadores.
En mi caso, voy a utilizar una PDB para unir los variadores y la batería entre sí, además, cabe indicar que esta placa incorpora luces y la posibilidad de montar una cámara para ver por donde va nuestro dron ZMR250.
Primero, empezamos montando dicha placa con el resto del frame, unimos los cilindros de aluminio con los tornillos del kit a la placa PDB, y luego montamos ésta con las patas y la parte de abajo del frame, apretando bien todos los 16 tornillos, para tener luego la estructura firme para seguir con el montaje.
Posteriormente, pasamos a soldar los motores con los variadores, teniendo en cuenta el sentido de giro de cada motor, dos giran a derechas y dos a izquierdas. Para ver dicho sentido, podremos conectar el variador a la emisora y una vez calibrado, vemos en que sentido giran, y si queremos que gire en el otro sentido basta con intercambiar dos de los tres cables que tiene que van del variador al motor. Para probarlos, tendremos que calibrar el variador con la emisora, primero la encendemos, luego damos corriente al variador, aceleramos a tope y luego a mínimo, escuchando unos sonidos, y cuando aceleremos en la siguiente vez, ya girará el motor.

Una vez soldados los motores con los variadores, podremos montarlos en el frame y soldar los variadores entre sí con la placa de distribución.

Una vez tenemos esta parte montada, procedemos a montar la Naze 32 en el frame y conectar todos los variadores, los cables del buzzer, el de la batería y los conectores de la emisora a ella. (Hay que darse cuenta que el conector usb nos quedaría hacia la parte de atrás, con el engorro que supone para futuras configuraciones, por ello mejor rotar dicha placa hacia uno de los lados y luego en el software indicarle la rotación).
Después de tener montado el dron ZMR250, procederemos a conectar el receptor de la emisora y así podremos ajustarla a la perfección con la Naze32.
Una vez conectado todo, procederemos a conectarla al ordenador para poder realizar una mejor calibración de la Naze 32 con los motores y ver si hemos conectado correctamente todos los cables del receptor de la emisora, así como indicarle la rotación de la Naze 32.
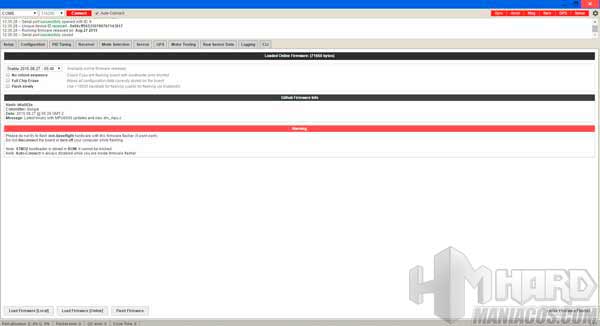
Previamente nos descargamos la aplicación para Chrome llamada Baseflight y el controlador, para comunicarnos con la Naze. Una vez instalada dicha aplicación, actualizaremos el firmware de la Naze 32, para lo cual pulsamos en Firmware Flasher y luego le damos, en la parte inferior izquierda a Load Firmware [Online], y por último al botón de la derecha donde pone Leave Firmware Flasher.

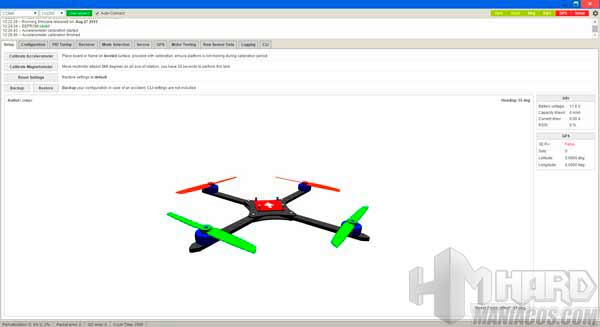
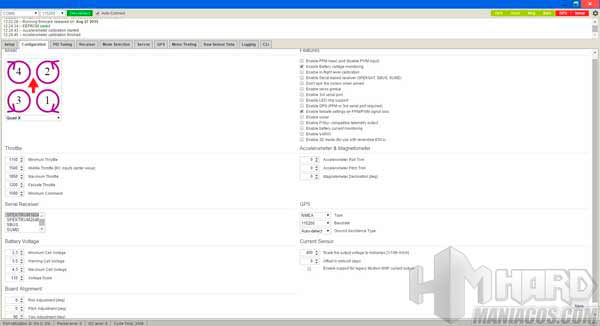
Teniendo ya todo instalado y actualizado es la hora de darle a conectar, donde nos saldrá la siguiente ventana en la pestaña de Setup, en la que veremos la posición de la Naze 32 en nuestro dron ZMR250. En ella podremos configurar el magnetómetro y el acelerómetro para que esté correctamente orientada con respecto al suelo, para ello basta con ponerla en una superficie plana para hacer la calibración. Para el magnetómetro, tendremos que rotarla sobre si misma 360º.
En la pestaña Configuration, configuraremos la posición de la Naze, indicándole +90 o -270, según como la hayamos colocado, la velocidad máxima y mínima de los motores, el sensor de voltaje, etc.
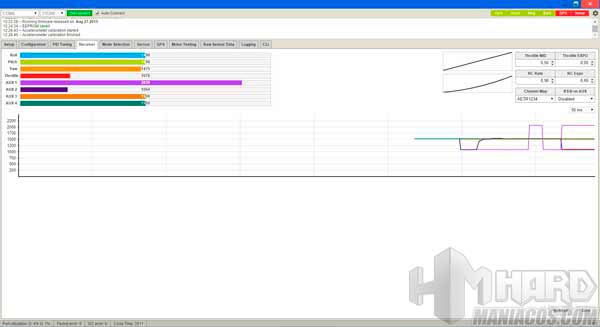
En la pestaña Receiver, comprobaremos si los controles de la emisora responden a la posición que tienen que estar, pudiendo ajustar los trimers de cada canal en el centro, evitando así derivas en el vuelo del dron ZMR250.
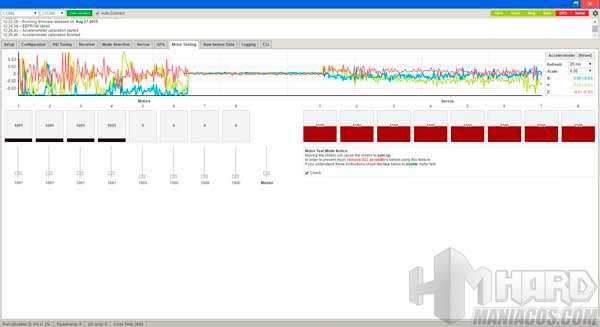
Finalmente, en la pestaña Motor Testing, calibraremos los motores para que todos giren a la vez y a las mismas revoluciones, para ello tendremos que hacer lo mismo que hicimos antes, en este caso con la alimentación quitada marcamos el check para que todos los motores se muevan a la vez, y con el master aceleramos al máximo, luego conectamos la alimentación y aceleramos al mínimo, vuelve a hacer los pitidos y ya estaría calibrado, con lo que, si aceleramos ya nos girarían, pudiendo así ver el sentido de giro y las velocidades de cada motor.
Aquí os dejo una pequeña galería, donde podréis ver las fotos del Baseflight a un tamaño mayor en el que es más fácil ver los datos.
[galleryflickr id=»72157661124263901″]
Tan solo nos queda fijar bien la batería al frame y volar el dron ZMR250, siempre en sitios lo más abiertos posible y sin nadie alrededor, ya que si nos da o le damos a alguien podemos ocasionarle mucho daño.
Mejoras posibles
Una vez montado todo y probado su funcionamiento con las piezas básicas podremos, a mayores:
Añadir una cámara como la Gopro o SJ4000 para hacer grabaciones.
Añadir un emisor/receptor de vídeo para poder ver por donde pasamos.
Añadir un GPS, con lo que podremos configurar vuelos o que vuelva en caso de pérdida de señal de la emisora.
Próximamente subiré dichas mejoras ya implementadas en el dron ZMR250, con mis experiencias a la hora de manejarlo.
También os dejo un programa por si queréis hacer pruebas en el ordenador antes de salir a la calle, se trata del FPVFreerider, en este caso es una demo, si queréis comprarlo, podéis ir a este link de la propia web.
A continuación teneis un vídeo con los mejores momentos de mis vuelos, espero que lo disfrutéis.
También quiero dar las gracias a OverCraft 3D, que con los vídeos que subió a Youtube, que aquí os dejo, pude montar mi dron ZMR250 sin problemas.